win11安装Docker(2504胎教级重置版)#
——并手把手教你配置导航组一轮考核所需环境
由于这沙卵Hyper-V干没了本人40h的星露谷存档以至于本人一直在寻找可以绕过安装Hv来下载docker的方法,征用了队里三位环境比较干净的机械哥的win11电脑测下来,基本上照着这个流程可以稳定配好docker了,快滚啊毁掉我存档的史
启用windows功能#
更新windows系统
(个人感觉win暂停更新已经是旧习了,win11发展到现在总体上来讲是越更新越稳定,不更新反而容易出事的,开一下手动更新不要不知道什么时候忽然自动下载重启了就好控制面板->程序->启用或关闭windows功能
勾选
适用于Linux的Windows子系统和虚拟机平台或Virtual Machine Platform(不同电脑这个选项不一定是中文/英文)确认,重启电脑
下载wsl#
以下操作务必在配置好科学上网的情况下进行
以管理员身份运行Windows PowerShell
运行以下命令禁用虚拟环境
dism /online /enable-feature /featurename:Microsoft-Windows-Subsystem-Linux /all /norestart dism /online /enable-feature /featurename:VirtualMachinePlatform /all /norestart
下载wsl
wsl --install
如果出现如下图所示的报错
已禁止(403)大概率是网络问题,检查一下科学上网有没有开好,Allow LAN开起来,Global开起来,来回换换各个节点,反复install试试。目前在各个电脑上测下来基本上只出现过这个问题,也基本上只要网络好了就会忽然能下载,总之先暂且不要到处改配置,实在是下不来了再说。
(图中几次install只更改过科学上网节点)更新wsl
wsl --update
设置wsl版本为2
wsl --set-default-version 2
重启电脑
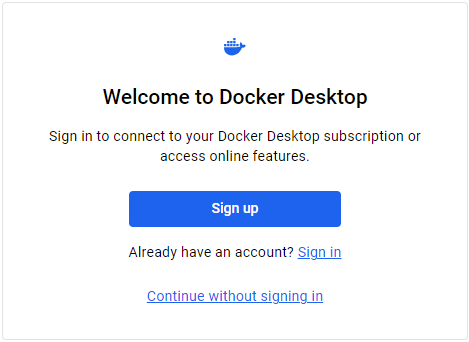
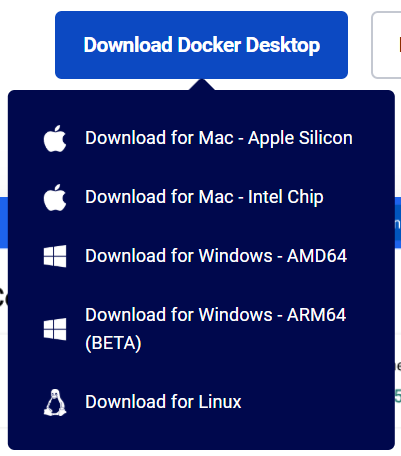
下载Docker Desktop#
运行并开始下载
continue without sign in
skip
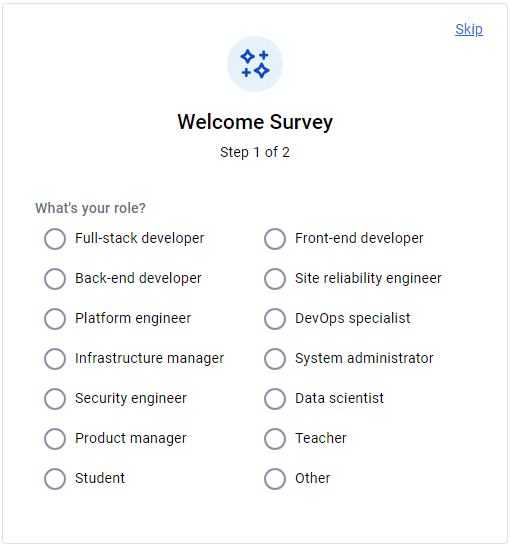
可能需要等待一会来初始化
更改镜像存储路径:右上角设置->Resources->Advanced->Disk image location->选择你希望的文件夹->Browse
下载图形化显示软件#
运行installer
运行Xlaunch,选择Next->Next->勾选
Disable access control->Next->Finish此后每当你需要图形化显示时,确认自己电脑中运行着VcXsrv
测试环境#
测试docker
docker pull ubuntu docker run -it --name test1 ubuntu docker ps -a
能正常拉取镜像、创建容器就差不多了
下载X11apps测试图形化显示:
apt-get update && apt-get install -y x11-apps
配置VScode远程连接#
安装如下插件:
Dev Containers
Docker
Docker DX
Remote - SSH
Remote - SSH: Editing Configuration Files
Remote - Tunnels
Remote - Development
Remote - Explorer
WSL
安装好后vscode左侧会显示docker的小鲸鱼,
CONTAINERS下会显示所有的容器,右键一个运行中的容器->附加Visual Studio Code,即可在一个新窗口中连接到容器。
推荐用来完成考核的docker镜像#
拉取基础镜像
docker pull ros:humble-perception-jammy
创建docker容器
docker run --name navtest --gpus all -dit --ipc=host --net=host --privileged -e DISPLAY=host.docker.internal:0.0 -e NVIDIA_DRIVER_CAPABILITIES=all -v F:\yu:/data ros:humble-perception-jammy
安装一些前置的软件包
apt-get update && apt-get install -y \ software-properties-common \ wget python3-pip git-lfs \ aptitude usbutils inetutils-ping \ ros-humble-ament-cmake \ python3-rosdep \ openssh-server vim libnet-ping-perl libnet-ifconfig-wrapper-perl
apt-get update && apt-get install -y \ libusb-dev unzip ros-humble-sdl2-vendor \ ros-humble-joint-state-publisher \ ros-humble-rviz2 \ ros-humble-rqt ros-humble-rqt-robot-steering \ ros-humble-rqt-common-plugins ros-humble-rqt-tf-tree
pip3 install --upgrade pip pip3 install -i https://pypi.tuna.tsinghua.edu.cn/simple rosdepc
设置图形化所需的环境变量
在/root/.bashrc的最后一行添加以下内容export DISPLAY=host.docker.internal:0.0
更新配置
source /root/.bashrc
rosdepc init && rosdepc update && . /opt/ros/$ROS_DISTRO/setup.sh && rosdepc install -y --from-paths src --ignore-src -r -y --rosdistro $ROS_DISTRO
至此,你已得到了一个配好ros2而尚未配好nav2环境的镜像,可以继续愉快地做考核题了~