Day1~now#
太神秘了arm64+ubuntu20.04
环境配置#
ssh#
虽然最后还是懒得ssh了
Host alias
HostName 192.168.31.30
User agilex
vscode#
喜提vscode底层框架与沙箱机制冲突
发现code --no-sandbox可以解决,遂:
sudo vim /usr/share/applications/code.desktop
修改为 Exec=/usr/share/code/code --no-sandbox %F
docker#
安装#
尝试sudo apt-get update但报错ROS软件源的数字签名密钥过期,导入新秘钥
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
然后再更新
sudo sed -i 's+download.docker.com+mirrors.tuna.tsinghua.edu.cn/docker-ce+' /etc/apt/sources.list.d/docker.list
sudo apt-get update
sudo apt-get install ca-certificates curl gnupg
添加 Docker 的官方 GPG 密钥
sudo install -m 0755 -d /etc/apt/keyrings
curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /etc/apt/keyrings/docker.gpg
sudo chmod a+r /etc/apt/keyrings/docker.gpg
写入软件源地址
echo "deb [arch=$(dpkg --print-architecture) signed-by=/etc/apt/keyrings/docker.gpg] https://download.docker.com/linux/ubuntu $(. /etc/os-release && echo "$VERSION_CODENAME") stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null
安装 Docker Engine
sudo apt-get update
sudo apt-get install docker-ce docker-ce-cli containerd.io docker-buildx-plugin docker-compose-plugin
将当前用户加入Docker用户组
sudo usermod -aG docker $USER
newgrp docker
配置图形化转发#
忘了怎么配了,要用再说(
熟悉遥控器#
左右电源开关同时按下开关机
左侧第二个SWB切换控制模式:
上:导航模式,接收/cmd_vel
中:手控
下:?
右侧SWC开关切换速度档位,最上低速,最下高速
导航#
居然没怎么配置雷达直接就ping通了
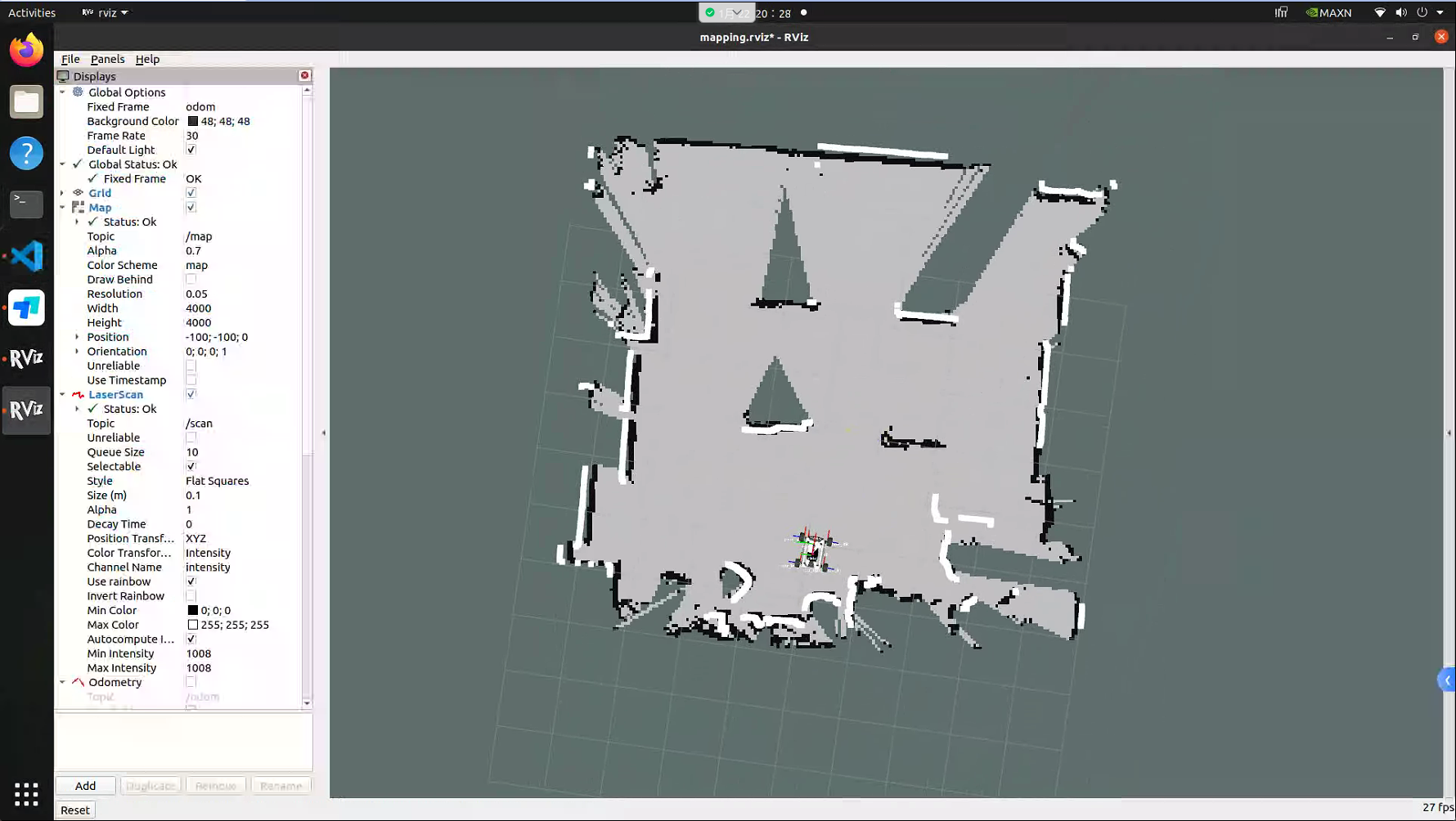
建图#
cartographer的launch文件居然妹有了,只能跑gmapping了
浅改了一下终端配置,以后就不需要反复输source /opt/ros/noetic/setup.bash source ~/agilex_ws/devel/setup.bash了
发布baselink2laserlink
roslaunch scout_bringup open_rslidar.launch
启用建图
roslaunch scout_bringup gmapping.launch
保存地图
rosrun map_server map_saver -f ~/agilex_ws/src/scout_ros/scout_description/maps/map
get:
导航#
move_base竟然也是/cmd_vel,那感觉架bridge把ros2的cmd_vel转发过去应该是可行的,下一步试试
小坑1,竟然没有重定位,竟然发布目标点之后需要点一下开始导航才开始规划,竟然goal成功了不清除目标点,很神秘吧movebase
小坑2,can通信,没启动can2usb,cmd_vel猛猛发车倒是一点不动,还以为我看漏了:)
发布baselink2laserlink
roslaunch scout_bringup open_rslidar.launch
can通信
rosrun scout_bringup setup_can2usb.bash
启动导航
roslaunch scout_bringup navigation_4wd.launch
懒得每次都要配置can了,写了个开机自启的服务
agilex@agilex-desktop:~$ mkdir -p ~/scripts
agilex@agilex-desktop:~$ gedit ~/scripts/setup_can.sh
agilex@agilex-desktop:~$ chmod +x ~/scripts/setup_can.sh
agilex@agilex-desktop:~$ sudo vim /etc/systemd/system/scout_can.service
agilex@agilex-desktop:~$ sudo systemctl daemon-reload
agilex@agilex-desktop:~$ sudo systemctl enable scout_can.service
Created symlink /etc/systemd/system/multi-user.target.wants/scout_can.service → /etc/systemd/system/scout_can.service.
agilex@agilex-desktop:~$ sudo systemctl start scout_can.service
agilex@agilex-desktop:~$ ifconfig can0
can0: flags=193<UP,RUNNING,NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 1000 (UNSPEC)
RX packets 2999 bytes 23992 (23.9 KB)
RX errors 0 dropped 2999 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
再见了所有的前摇
改仓库#
emmm居然甚至还没初始化,填了我的邮箱和姓名
目前是src下面的几个子文件夹分别用git管理了,打算还是统一一个git方便一点,把子文件夹的.git全都改成了.git_temp备份,在src重新初始化了一个仓库