第九周#
重生之我要在这个周末跑穿全流程
重生之在旗姐的帮助下勉强跑穿了全流程
梳理:
建图
ros2 launch sentry_bringup mapping.launch.py
保存地图
存.png:
ros2 run nav2_map_server map_saver_cli -t /projected_map -f test_map --fmt png
存.pcd
ros2 service call /map_save std_srvs/srv/Trigger
图片地址问题见sentry_ws/readme.md
串口通信
本地里的工作空间24Sentry_AutoAim:colcon build --packages-select rm_serial_driver
source install/setup.sh
ros2 launch rm_serial_driver serial_driver.launch.py
用rqt发布话题/tracker/target 消息类型Target
重定位&路径规划
ros2 launch sentry_bringup bringuo_all_in_one.py
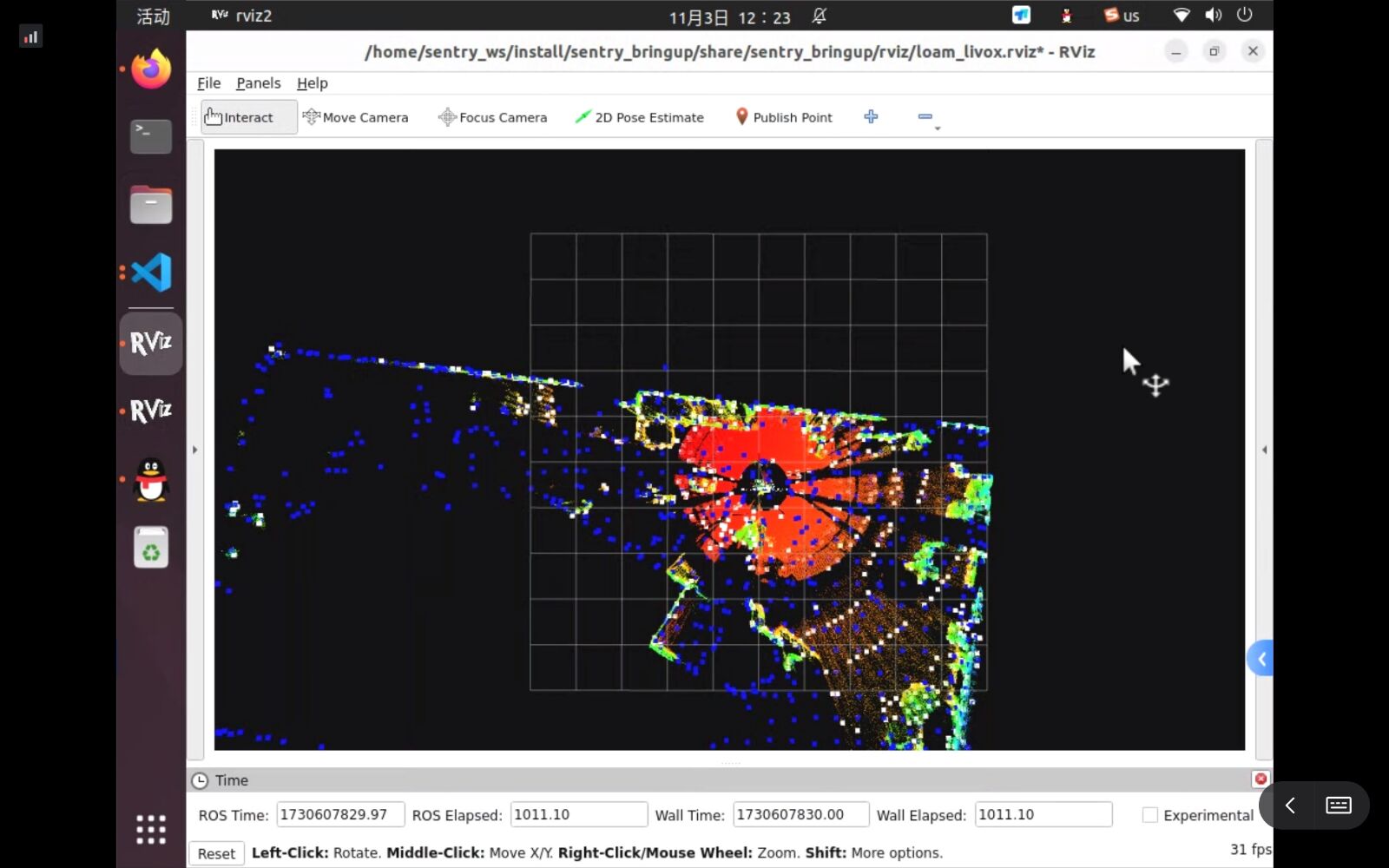
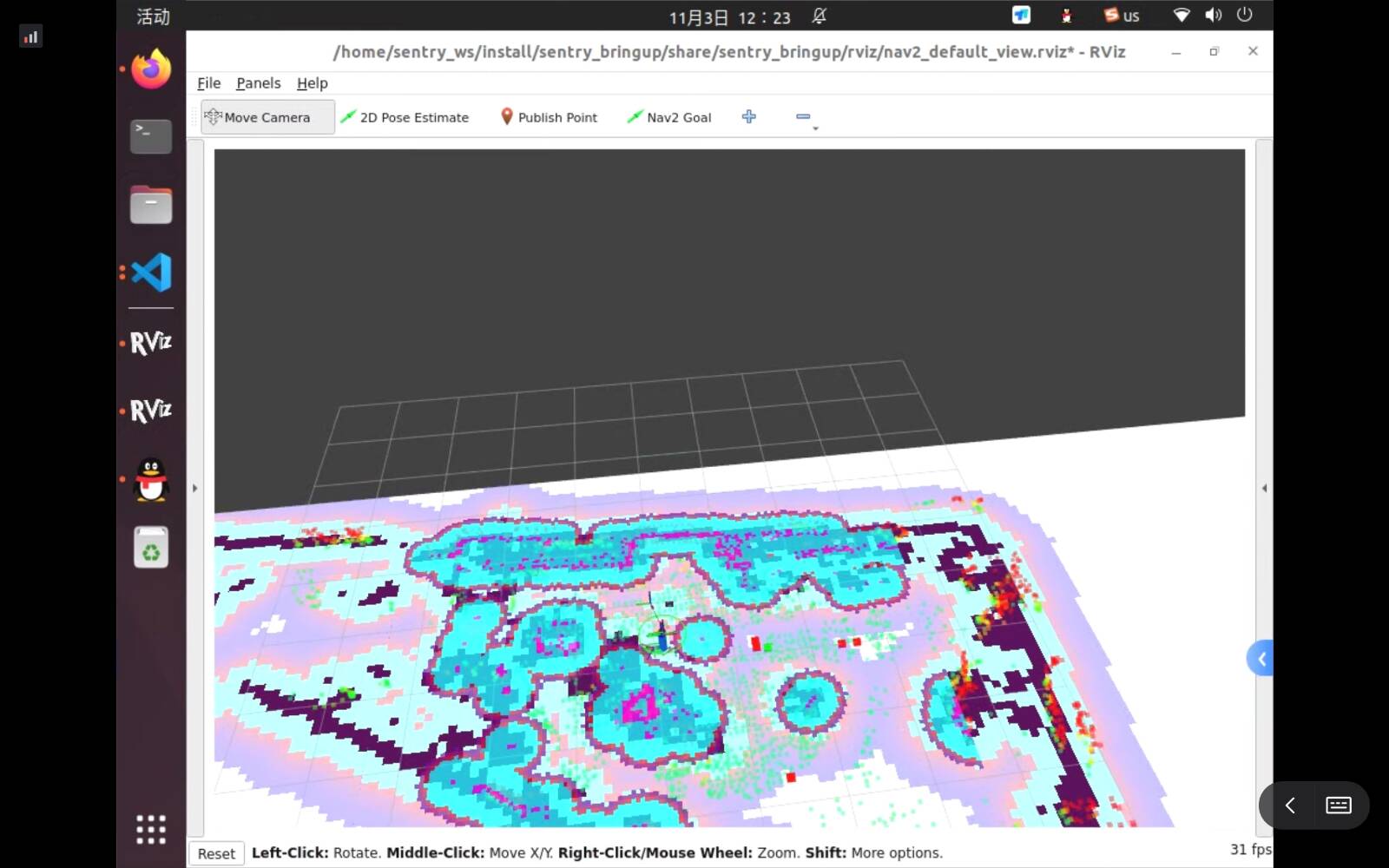
地图上出现了这些蓝色紫色的层了,就说明定位已经好了
如果还规划不了路径就去看命令行的输出,如果显示起始点/终点都是障碍物,无法规划路径就是有误识别,看建图是有噪点/把自己身上的东西认成障碍物,噪点就自己ps一下
江安这边还是太乱了+机械赶着拆车,没最终录出来跑路径规划的视频,但串口通了能用键盘控+重定位没有问题只是障碍物误识别,其实属于是后续地图处理的问题了,整个框架算是已经跑通了
地图处理+看具体代码实现+算法优化留给下阶段吧