第七周#
关于串口#
实在想不起来以前的口都是怎么接的了遂重新绑的串口,目前USB的虚拟串口插在了底部右侧下面的USB接口上
串口绑定教程
10.17-10.19:串口测试#
首先依旧是串口绑定(如上),过程中手改了一下
/home/scurm/24Sentry_AutoAim/src/rm_serial_driver/config/serial_driver.yaml中的路径# device_name: /dev/ttySerialCom device_name: /dev/ttyACM0
小电脑本地里的工作空间24Sentry_AutoAim:
colcon build --packages-select rm_serial_driver
source install/setup.sh
ros2 launch rm_serial_driver serial_driver.launch.py
在docker中:
ros2 run cmd_chassis twist2chassis_cmd
ros2 run cmd_chassis twist_transformer
用rqt发话题/tracker/target 消息类型Target
启动键盘控制
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args --remap cmd_vel:=cmd_vel_in_yaw
能动就是通信通了 测通后再考虑速度标定的问题
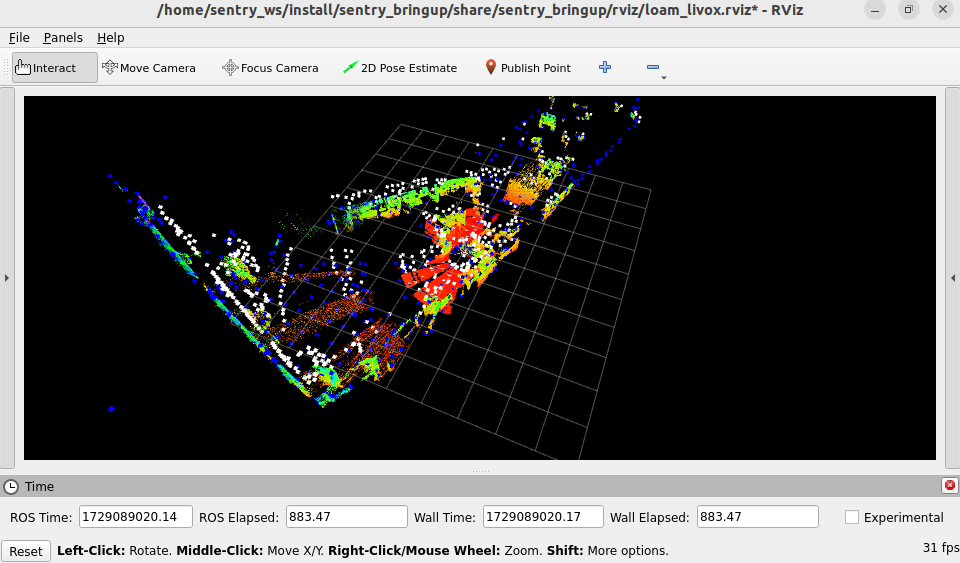
关于建图#
建图的时候显然这是把跟着他走的我也当成障碍物了
旗姐提供的解决方案:
在livox viewer里面设置雷达的fov,让他的后半部分不工作,站在不工作的范围里面(不推荐,赛场上会有其他人)
把点云放到cloud compare里面处理,去掉人的残影
关于重定位#
rviz有问题,完全不显示在仿真里弹出来的那种粉粉绿绿的定位效果,可能是rviz的命令被注释掉了
解决方案:用vscode的全局搜索限制在.py文件里找rviz相关的命令,但找出来的实在是太多了,目前的思路是和仿真里面的各种launch.py对比,朴素的肉眼比对排查……
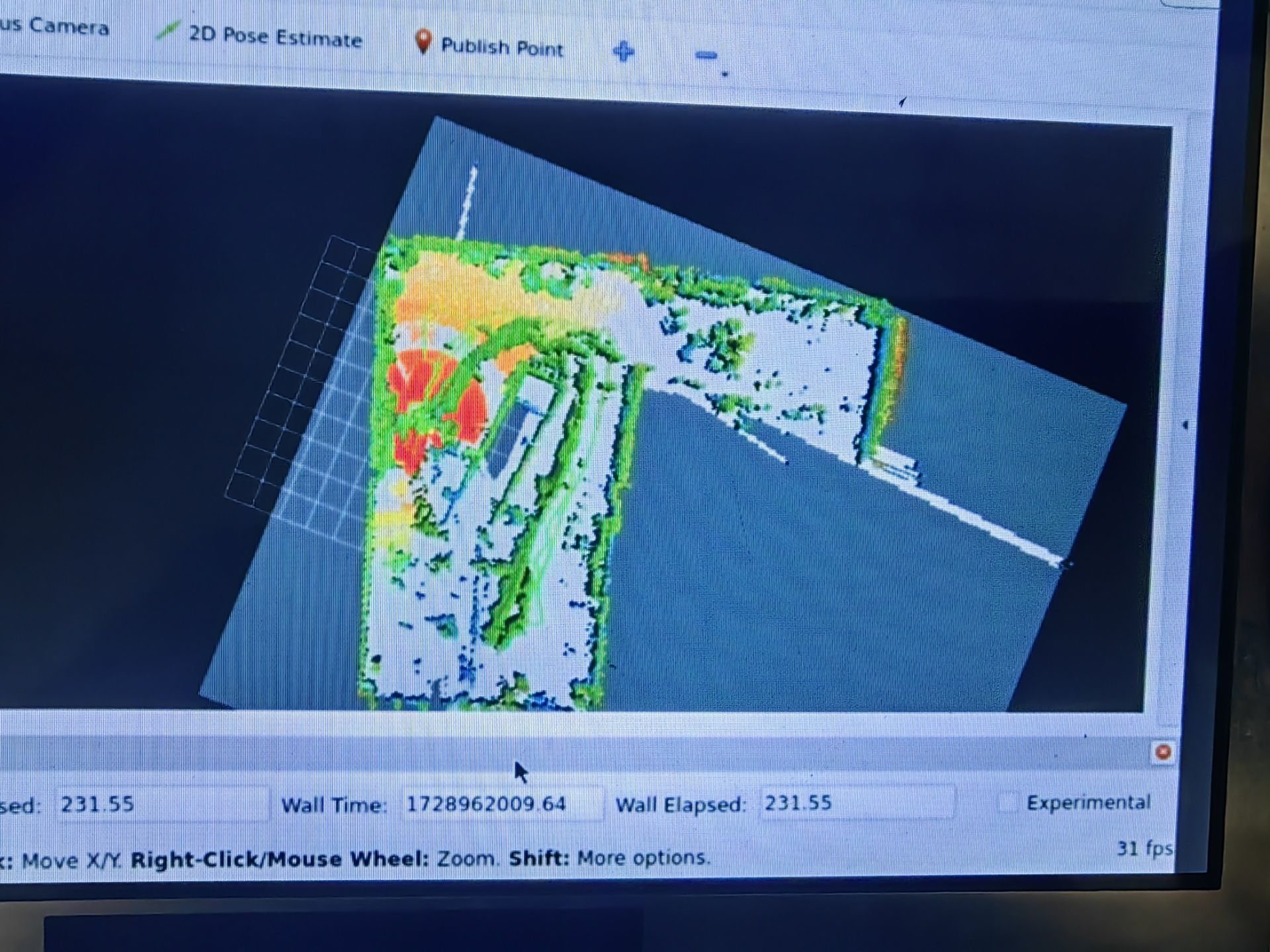
10.16:大致跑通了重定位#
启动命令:
ros2 launch sentry_bringup relocalization.launch.py
建图得到的.pcd地图需要保存在/home/sentry_ws/src/FAST_LIO_SAM/PCD/GlobalMap.pcd中
尝试修改了icp_relocalization包icp.launch.py中的路径,但完全没有什么效果,目前只能直接改地图名,这个等后续详细看代码吧
匹配时需要提供一个大致的初始值,可以在launch文件里改或用rviz里的pose estimation
效果: