第八周#
进度感人,换个电脑一堆问题,git也几乎等于没学纯纯巨大的依托
更新了一些public文档
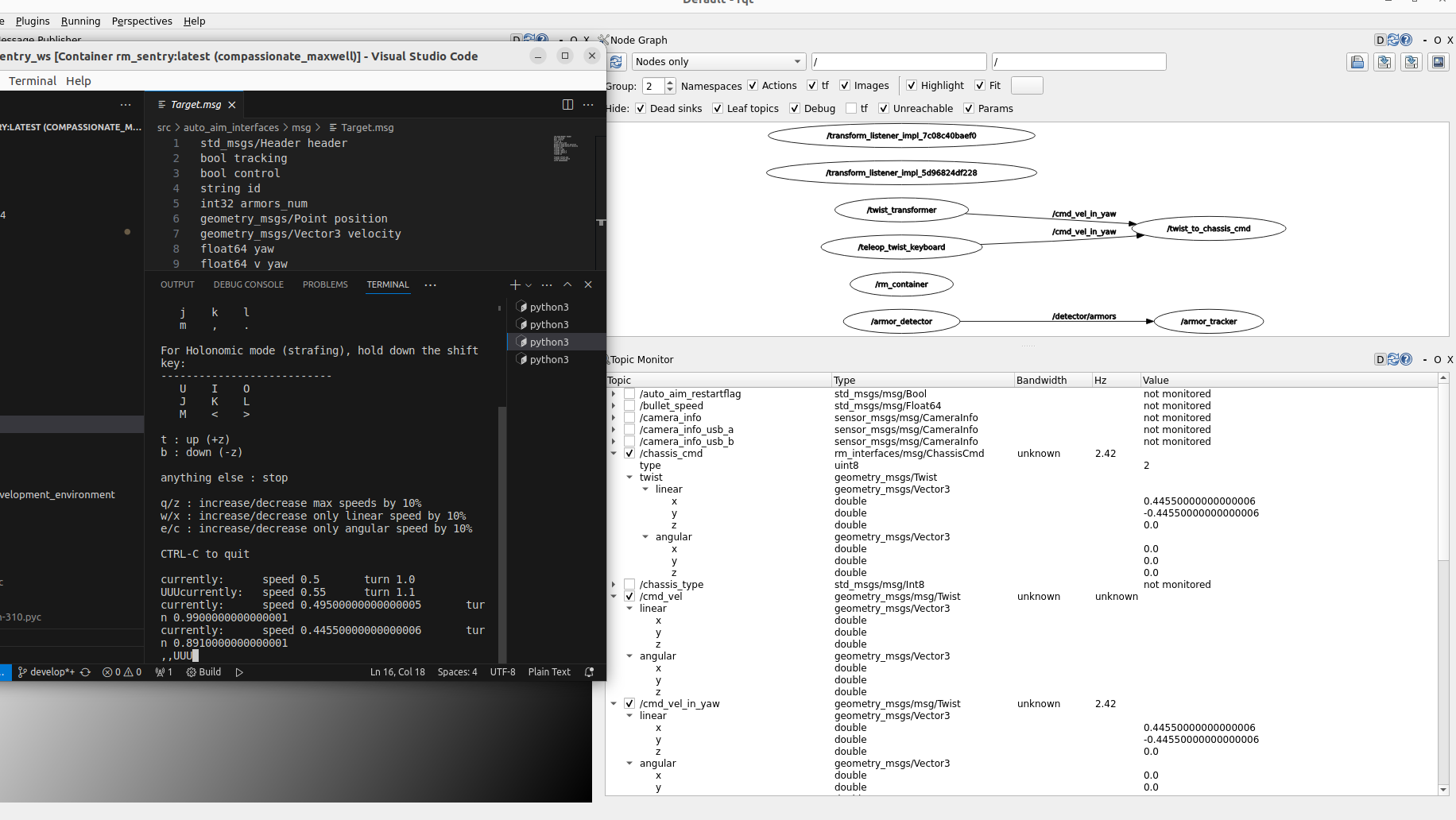
基本上测通了和电控的通信#
[cmd_vel_in_yaw]–twist_trasformer–>[cmd_vel]–twist2chassis_cmd–>[chassis_cmd]–rm_serial_driver–>[电控]
看cmd_vel话题有没有输出(说明控制命令发出了);
看chassis_cmd话题有没有输出(说明控制命令类型转换成功了);
看chassis_cmd话题的接收者有没有serial driver(说明通信打开了);
看/tracker/target话题有没有输出(因为chassis_cmd必须和tracker/target一起发出电控才收得到)
ros2 topic echo /chassis_cmd #监听话题内容
ros2 topic info [topic_name] -v #查看话题详细信息
具体流程见week7,反正最终能用键盘控底盘了